

光學知識科普1-對準、公差GD&T
光機系統中的“對準"
在光學系統中,對準的本質是控制光學元件相對于設計光軸的六自由度誤差。
任何剛體在空間中都有六個自由度:
三個平移(X, Y, Z)
三個轉動(繞X、Y、Z軸)
光學元件如果存在以下誤差:
去心(decenter)
傾斜(tilt)
軸向間距變化(despace)
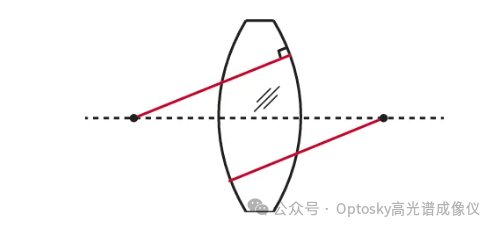
都會改變光線傳播路徑,從而引入像差。
對準誤差如何影響光學性能?
光學系統的性能通常用:
波前誤差(Wavefront Error)
調制傳遞函數(MTF)
像斑尺寸
光軸偏移
來評價。
當機械誤差存在時,本質上發生的是:
幾何位置誤差 → 光線傳播方向改變 → 波前相位改變 → 成像質量下降
書中強調:
對準問題不是“裝得正不正",而是
誤差如何通過系統靈敏度放大為性能劣化。
某些元件(如光闌附近的透鏡)對去心極為敏感,而某些元件則不敏感。因此:
對準必須基于誤差靈敏度分析,而不是經驗判斷。
公差的科學含義
公差不是簡單的“加工允許誤差",而是:
在滿足系統性能指標前提下,制造誤差的可接受范圍。
換句話說:
公差 = 性能約束 + 制造能力 + 成本平衡 的結果。
1. 公差的統計本質
制造誤差通常服從統計分布(近似正態分布)。
因此工程中常采用兩種分析方法:
(1)Worst-case 方法
假設所有誤差同時處于最不利方向。
結果保守,但成本高。
(2)RSS 方法(Root Sum Square)
基于誤差獨立且隨機的假設:
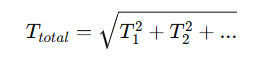
這是統計疊加。
書中指出:
光機設計應以統計公差為基礎,而非極&端假設。
功能基準
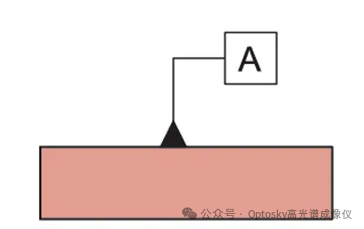
GD&T 是幾何尺寸與形位公差體系。
其科學意義在于:
將“功能要求"轉化為“可測量的幾何約束"。
在光機系統中,常見關鍵控制量包括:
同軸度
垂直度
平行度
圓跳動
位置度
功能基準(Functional Datum)
光學系統存在“功能基準":
光軸
像面
主光線方向
而機械系統存在“裝配基準":
端面
內孔
定位銷
GD&T的核心問題是:
如何讓機械基準正確表達光學功能基準。
如果基準選取錯誤,即使尺寸精度高,系統仍可能性能不達標。
對準與公差的關系
對準和公差并不是獨立問題。
可以這樣理解:
公差決定初始誤差范圍
對準決定最終誤差狀態
書中強調一個重要原則:
設計階段應通過合理的公差分配,使裝配過程盡量“被動完成對準"。
這意味著:
減少可調自由度
減少裝調復雜度
降低人為誤差
免責聲明
本文技術內容基于公開論文《Field Guide to Optomechanical Design and Analysis》
作者團隊來自 (Katie Schwertz James Burge) 。
本文僅為技術原理解讀與行業趨勢分析,旨在促進高光譜成像領域的學術交流與工程探討。文中所述系統架構、實驗結果及性能指標均來源于論文作者公開發表的研究成果,并不代表奧譜天成現有產品技術方案或商業化能力承諾。
部分技術推演與產業化分析為作者基于行業經驗的理解與延伸,不構成對任何第三方技術的評價或替代說明。
如涉及論文引用或轉載需求,請以原作者及原始文獻為準。

